|
irafhy
Interval arithmetic based Reachability Analysis Framework for Hybrid Automaton
|
|
irafhy
Interval arithmetic based Reachability Analysis Framework for Hybrid Automaton
|
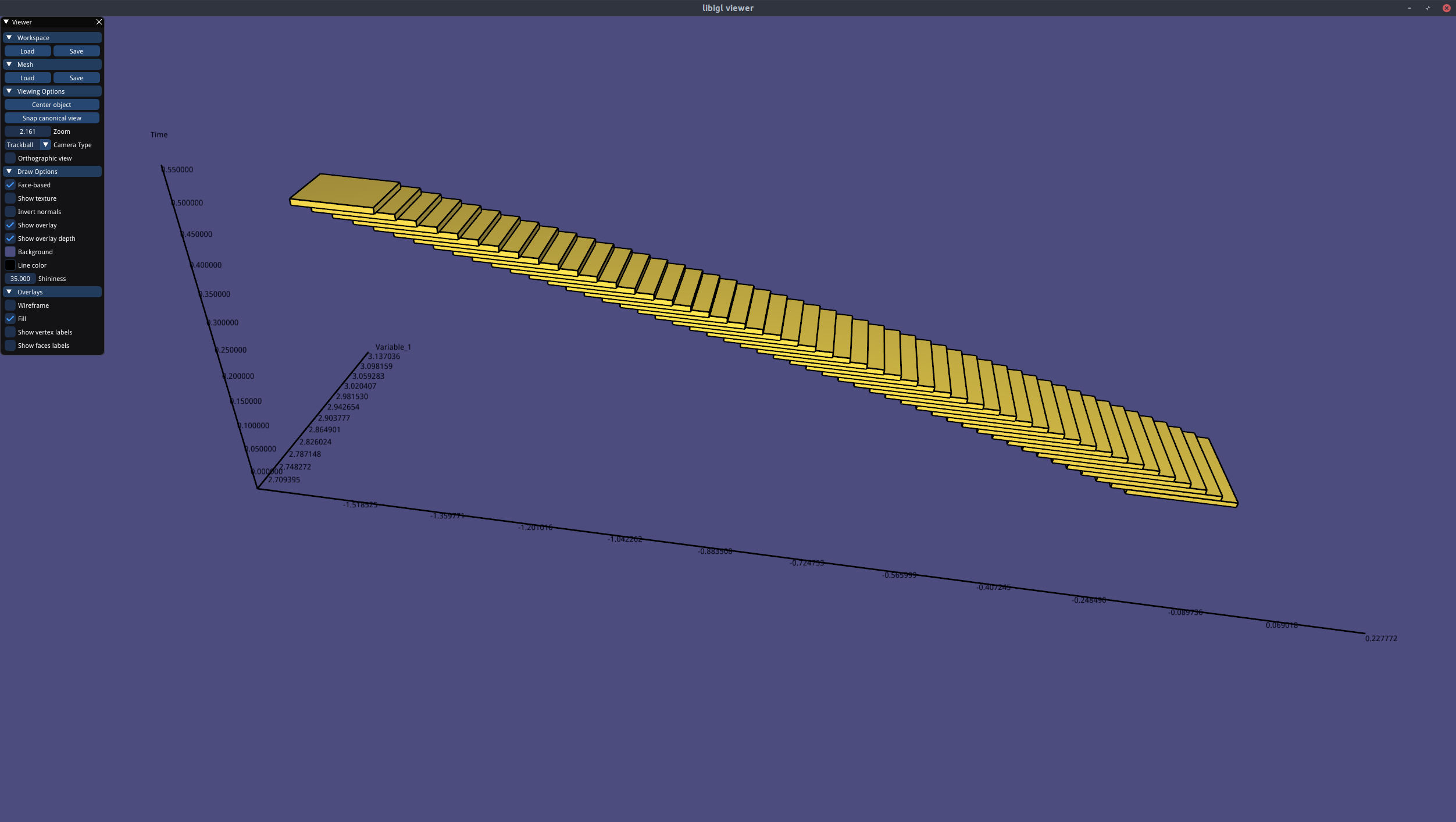
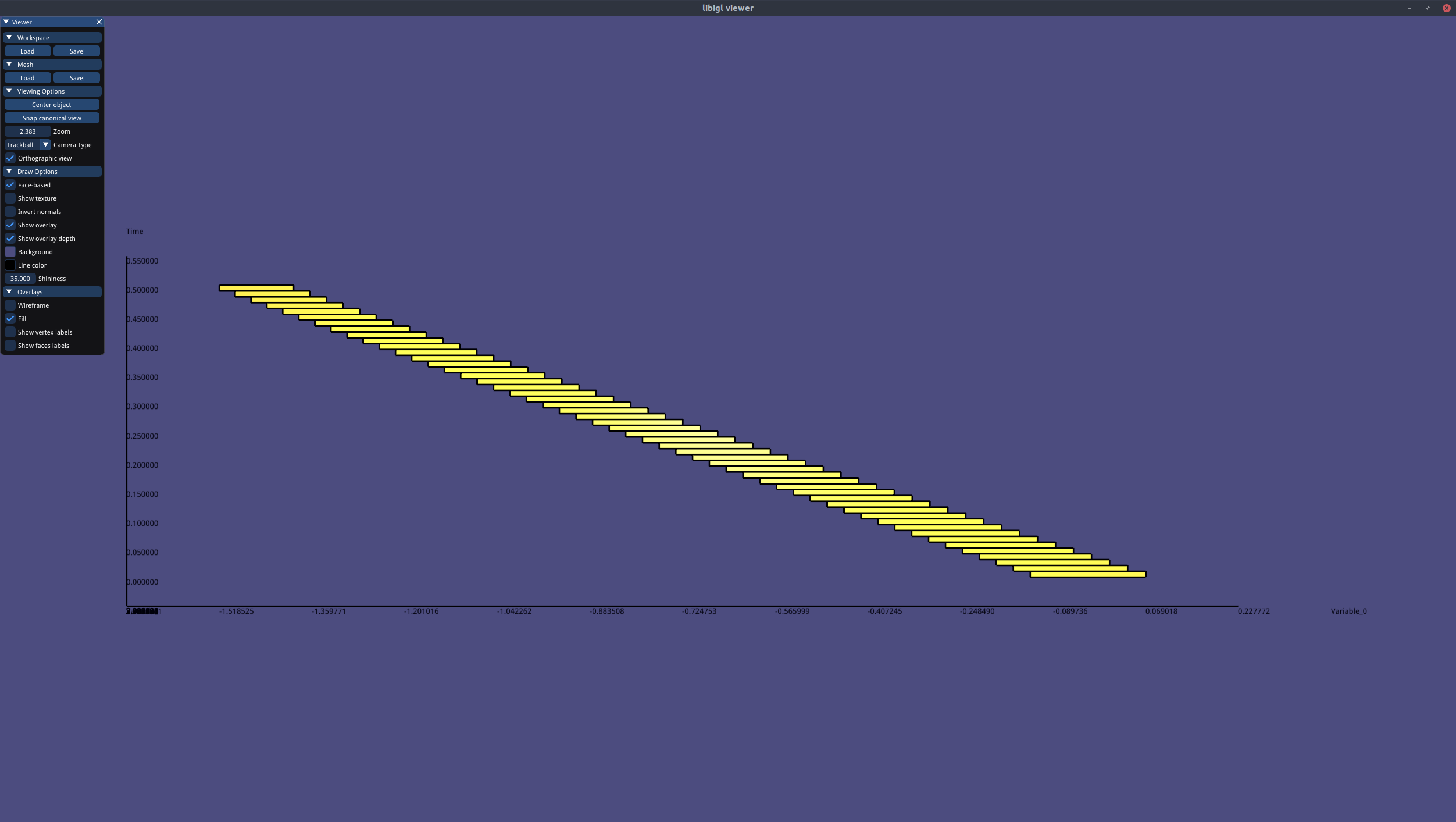
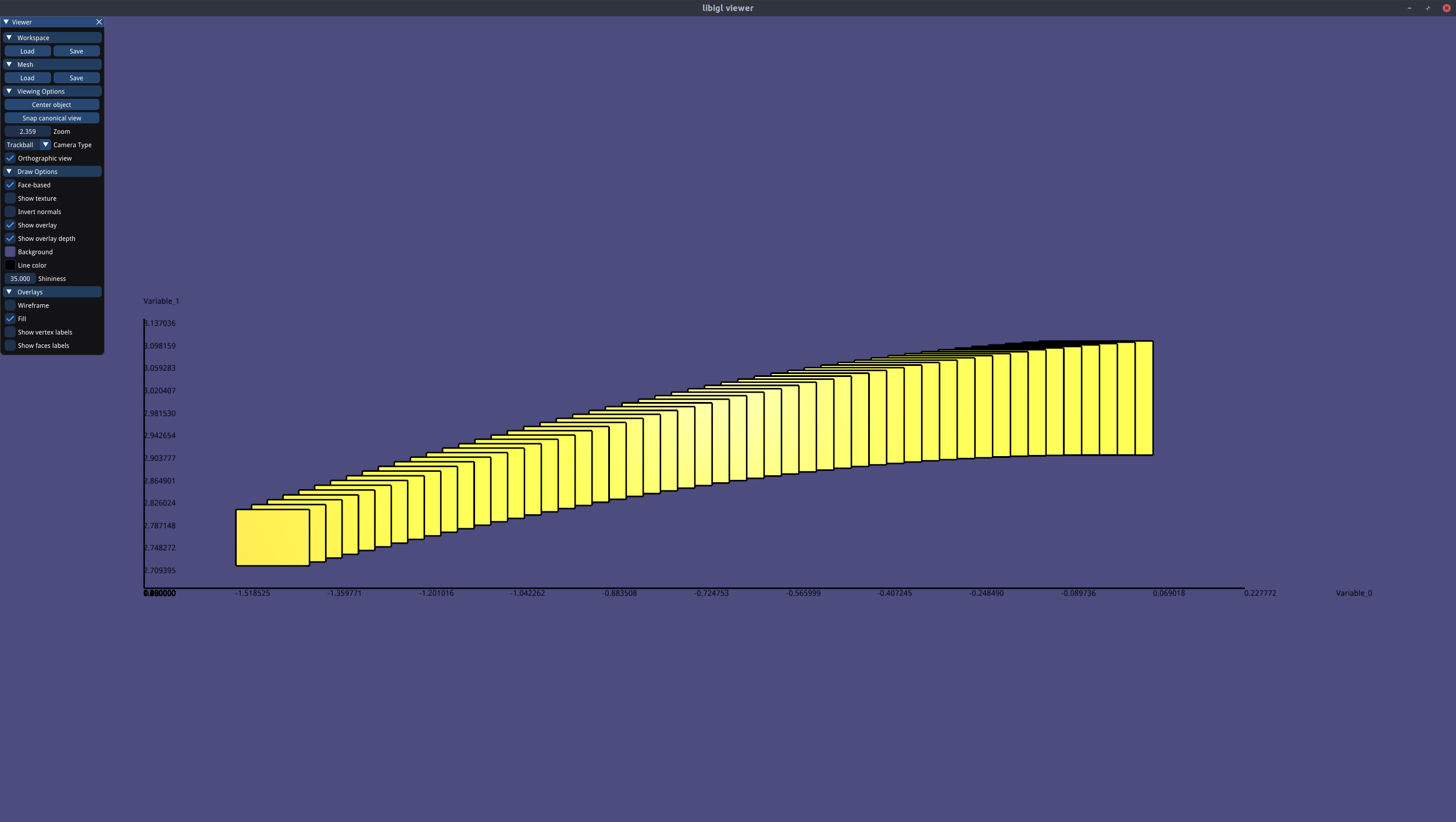
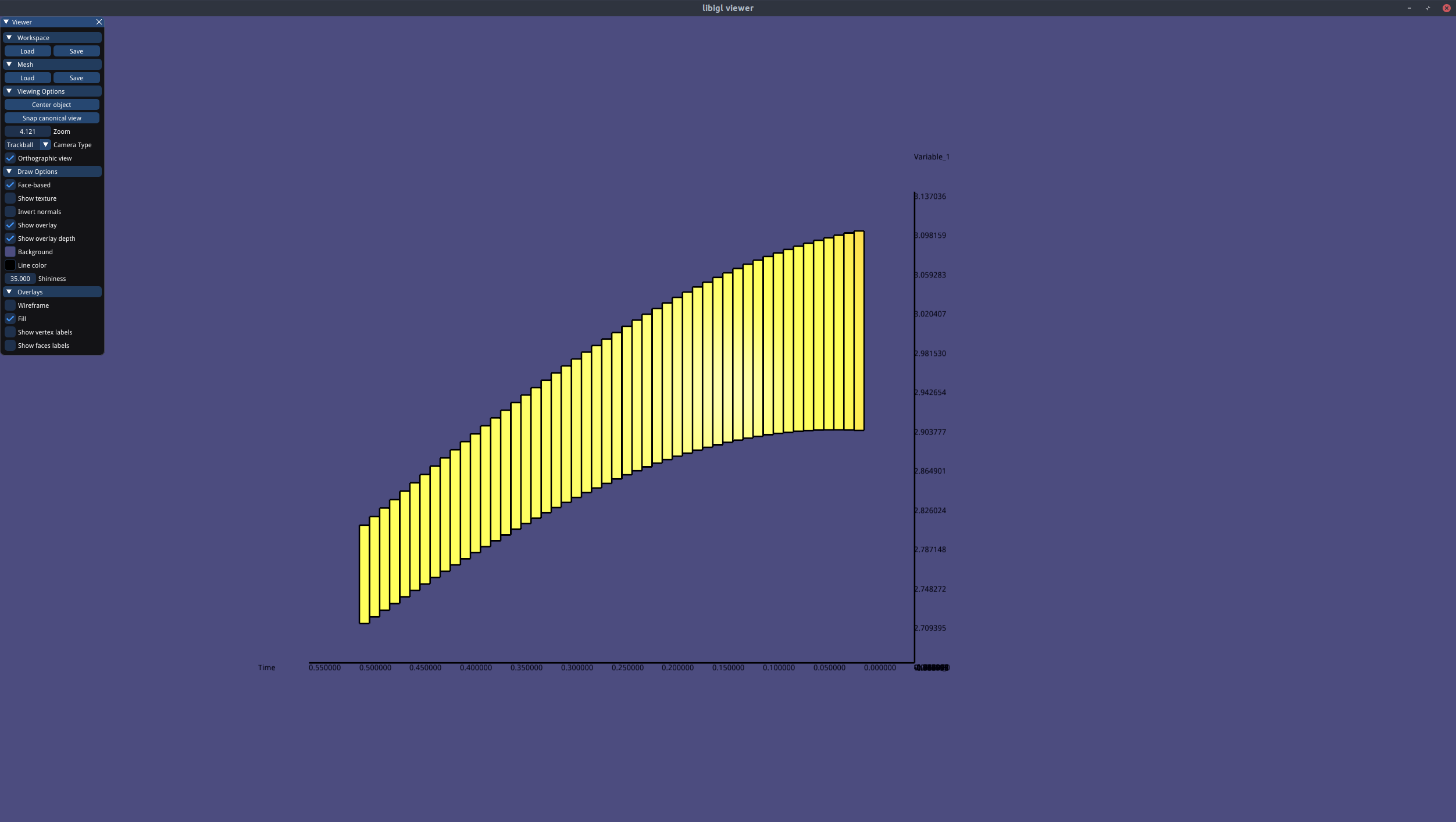
here are some screenshots of the results